제품소개
XTA All Servo Series
- 제품소개
- XTA All Servo Series
XTA All Servo Series
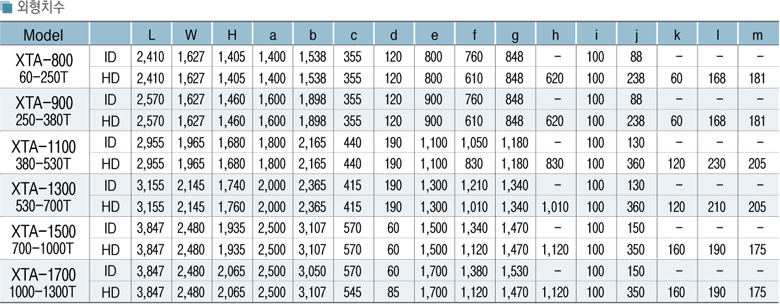
사출성형기 (60Ton ~ 1300Ton) 급 적용
- 2단 3축(5축) 서보모터 드라이버는 일본 Panasonic에서 수입하며 동작속도가 빠르고 정확한 포지셔닝, 제어가 용이합니다.
- 고정밀 리니어 가이드는 고속 작동시 정확하고 안정적인 운행을 가능케 하고, 내마모성은 사용수명을 길게 합니다.
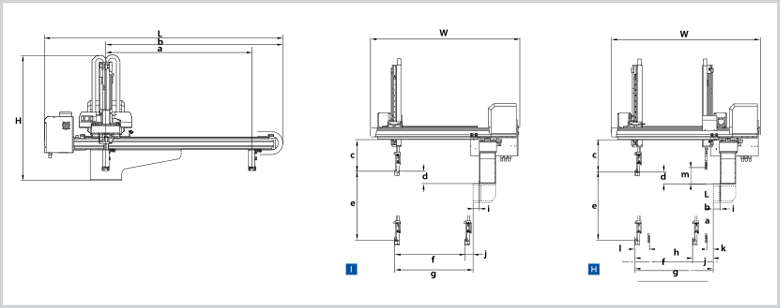
- 전후 및 주행운동은 T형이고 Z축은 Dual-beam구조로 취출능력, 안정성, 견고함을 향상하였습니다.
- Z축은 2단식 디자인으로 사이클 타임을 단축시켰습니다.
- 콤팩트한 디자인, 최적화 및 일체화된 캐비닛으로 공간을 최소화하였습니다.

|

|
Specification
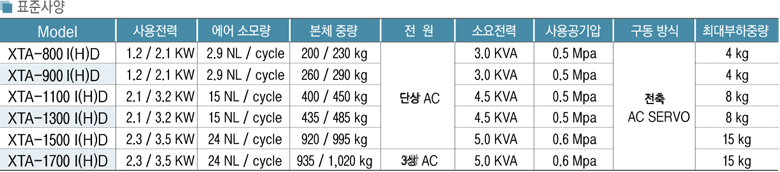
표준사양
| 로봇하강 대기 | 형개 완료 전 금형근처 하강 대기하여 Cycle Time을 줄이고 대기 위치는 임의로 설정할 수 있습니다. |
|---|---|
| 전진취출측 자세 제어 |
취출측 자세동작 실행 후 수직으로 긴 제품의 취출 주행동작을 실시합니다. 금형 위의 장애물과 주행축의 간섭을 피하기 위해 자세동작의 전후위치를 임의로 설정할 수 있습니다. |
| 주행 중 취출측 자세 제어 | 주행 중 자세동작은 주행복귀 시작과 동시에 자세복귀동작도 진행하여 Cycle Time을 줄일 수 있으며, 자세동작시작 시간을 조정할 수 있습니다. |
| 고정형판에서 취출 |
표준기계는 일반적으로 이동측 금형으로부터 제품을 취출합니다. 고정측 금형으로부터 제품 취출 옵션 사용이 가능합니다. |
| 주행 대기 | 금형 이동 구간에 장애물이 로봇 혹은 JIG에 간섭 발생시, ARM이 주행 중 사출기 외부에서 대기시킵니다. |
| 적재 위치 지정 |
제품 취출 후 임의로 적재 위치를 설정 가능합니다. 최대 1024점(1단계에 MAX 256점)을 설정할 수 있습니다. |
| 생산관리 | 생산계획 완료 시간은 계획생산수량을 입력하여 실현하며, 생산결과, 샘플링검사 등 생산관리에 필요한 자료는 그래픽을 통하여 표시됩니다. |
| 유지보수 | 정기검사, 일정, 품목, 각축의 윤활유 주입 일정은 화면에서 디스플레이 되며, 유지보수 이력(데이터포함)이 기록, 표시됩니다. |
| 외장 메모리 |
로봇의 설정조건(모드, 시간, 축위치, 포장) 데이터는 즉시 쓰기, 읽기, 비교, 삭제할 수 있습니다. 데이터는 외장메모리에 저장이 가능합니다. |
| 흡착 유닛 | 흡착 진공 유닛-1set |
| Runner 도중낙하 | 주행동작 중 Runner 낙하 또는 Stack Mold일 경우 주행복귀 동작 중 Runner 낙하 |
| 패키징 동작 | 이송 컨베이어벨트와 패키징설비 등 연동을 통하여 제품포장 동작을 진행합니다. |
| 경보기록기능 | 메모리 및 기존 발생한 경보상황 기록 기능 |
| WEB기능 | LAN 연결을 통하여 특별한 프로그램 필요없이 로봇의 설정조건과 동작상황을 Web으로 PC를 이용하여 디스플레이하고 인쇄합니다. |
| NC step 프로그램 | 기본동작 중 사용자 정의 프로그램을 실행할 수 있습니다. 필요한 DATA는 입력, 추가할 수 있습니다. |
| NC Step 간단설정 | 간단 NC Step 프로그램 설정이 특징이며 이 기능은 금형변경시 삽입 위치를 지정할 수 있고, NC 지점, 시간, 라벨 등은 재입력할 수 있습니다. |
| PC와 연결 | 프로그램 설치 후 커뮤니케이션 케이블을 연결하여 Data 전송, 인쇄, 편집을 진행합니다. |
| 저장기능 | 외부저장(999몰드) |
| 유럽규격 | 유로맵12 |
옵션사항
| 불량품 배출 | 불량품을 다른 곳으로 이동하여 효율을 높입니다. |
|---|---|
| Loop Slip 제거 | 구조물을 이용하여 제품 Loop Slip 제거 |
| 구리스 받이 | 구리스 흘림 방지용 |
| 제품 TWO POINT 개방 | 취출 후 낙하측의 서로 다른 2개의 위치에 제품 낙하 기능 / 각 척킹별 회로 필요 |
| 추가 진공 센서 유니트 추가 | 제품 진공흡착 센서 2개로 취출 |
| 전단 공압 더블 루프 | 제품을 놓는 위치에서 전단동작을 진행합니다. |
| 상승 중 형폐 | 사이클 타임을 줄이기 위하여 상승 중 형폐 시작 |
| 하강 중 형개 | 사이클 타임을 줄이기 위하여 하강 중 형개 시작 |
| 제품 회전기능 | 제품과 로봇 충돌을 막기 위하여, 금형내/ 금형외/ 낙하측에서 척 회전을 합니다. |
| 경보램프 | 로봇은 경보(특이사항) 발생시 경보램프가 ON이 됩니다. |
| 자동 JIG 교체 | 원터치 JIG 교체 |
| 유로 MAP | EURO MAP 67 |
| 언어전환 | 한/ 중/ 영/ 일/ 스페인/ 포르투갈/ 독일/ 러시아 중 택 2 |
콘트롤러

콘트롤러 특장점
- 내장된 실시간 시스템, 고신뢰성, 고확장성, 고통합성
- 칼라터치스크린, Full 그래픽 인터페이스, 간단한 조작방법 (7인치, 5.6인치, 3.6인치)
- 유로맵 12 표준 인터록으로 사출기와 로봇의 안정성 확보 (옵션 Euromap 67)
- 주행 중 런너 Drop 기능은 낙하위치 등을 설정할 수 있습니다.
- 공압 확인 기능은 공기압과 흡착압력을 감시하고, 수치로 나타냅니다.
- 적재 정렬기능 : 표준기능 (256)
- 고정모드, 자유모드 선택가능
- 대형 메모리 용량
- 로봇 ARM은 금형내, 외, 측면에 있을 수 있습니다.
- 작업순서 메모리 가능하며, USB 오프라인에서 편집 가능합니다.
- 자동으로 에러를 검측하여 화면에 반영할 수 있습니다.